序:
Inventor 基本功能包含3D模型建構、零件組立 與 機構模擬、工程圖出圖 等,另有
>>FDU模組 : 產線配置;提供可參數設備資源庫優化工廠設備產線配置設計流程
>>Inventor Studio模組 : 動畫彩現模擬;串聯Inventor各項機構動作於時間軸及動畫彩現整合
>>Inventor Simulation : 動力學模擬;透過機構接頭與動力學條件設定模擬機械結構運動
筆者曾使用 Inventor Simulation 進行機械手臂模擬,並搭配 Inventor Studio 與機械動作串聯,前後累積十多件應用案例
請參考連結 https://youtu.be/cynEAm9AHR0
https://youtu.be/eIrTxz3VcHI
但畢竟 Inventor Simulation 並非專為機械手臂開發的模組,其功能、介面確實不足,更遑論後續與控制器&機械手臂的資料傳輸結合
近年在找尋/測試機械手臂專用軟體,適逢客戶訊問 ABB機械手臂 的軟體搭配應用,並希望與Inventor機械設計 作整合,遂萌生建構 Inventor整合ABB RobotStudio 應用範例的念頭
執行計畫
- >> ABB RobotStudio 機械手臂動作行程設計&模擬
- >> ABB RobotStudio 模擬資訊匯入Inventor Simulation 動力學模擬
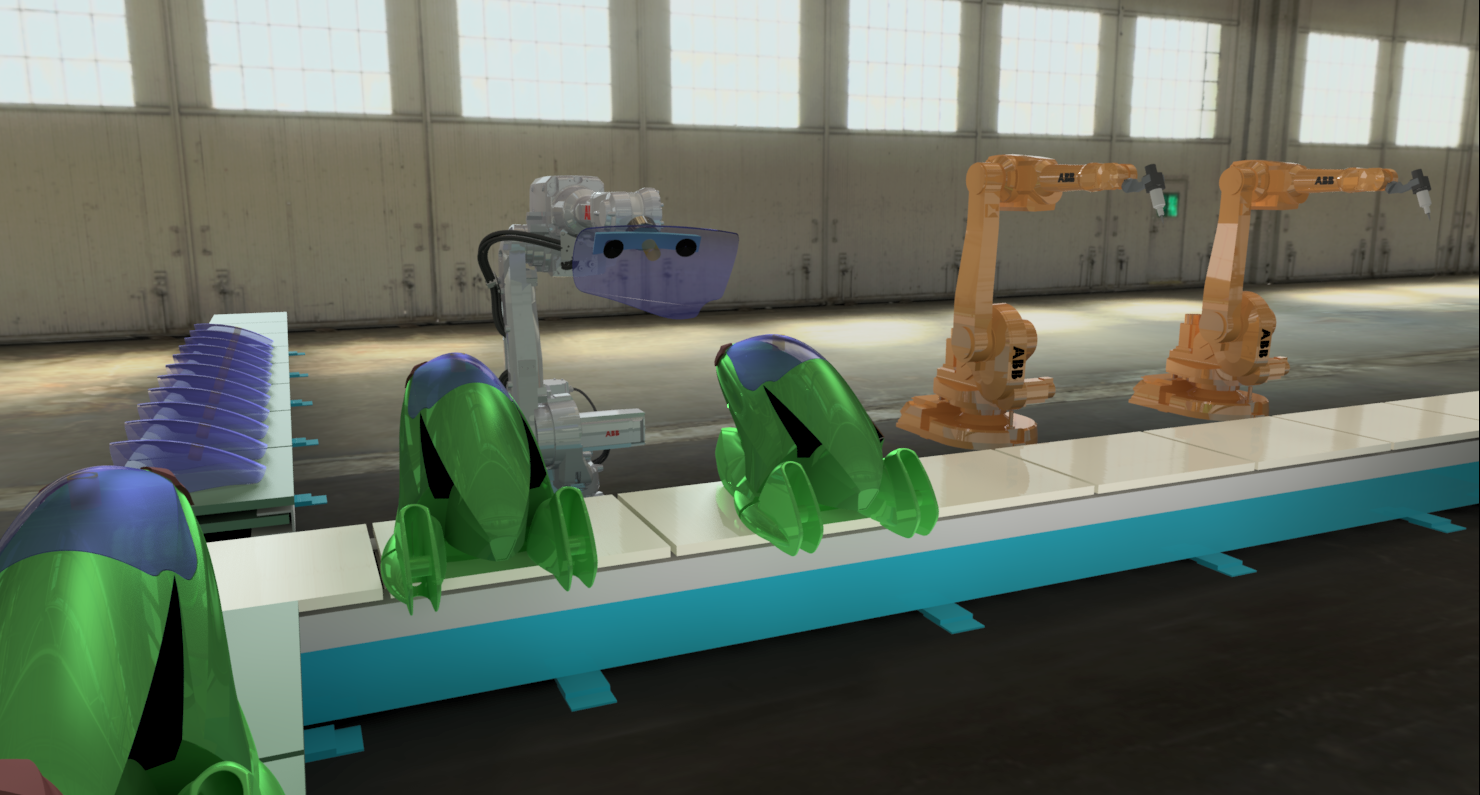
- >> 產線模擬整合 ABB RobotStudio + Inventor Factory Design + Inventor Simulation + Inventor Studio
>> ABB RobotStudio 機械手臂動作行程設計&模擬
- 作業一:匯入CAD(Inventor)3D模型並定位
- 作業二:載入機器人系統與附加配備並連結
- 作業三:訂定目標點(工作點)並調整方位
- 作業四:連結目標點建立路徑、模擬依路徑移動
- 作業五:模擬路徑同步到RAPID;啟動仿真運行
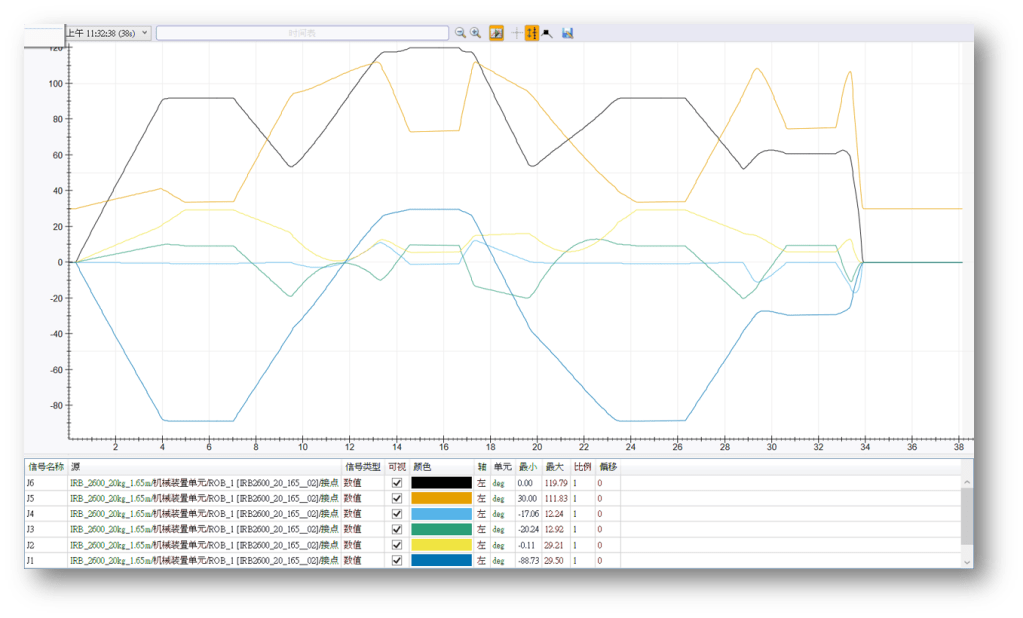
- 作業六:啟用&設置信號分析器;擷取機械手六軸運動資料
- 作業七:新建工具由匯入、方位設定、連結機械手、設定目標點、設定運動路徑
- 作業八:碰撞檢測、動畫錄製、六軸運動資料匯出
>> ABB RobotStudio 機械手臂動作行程設計&模擬
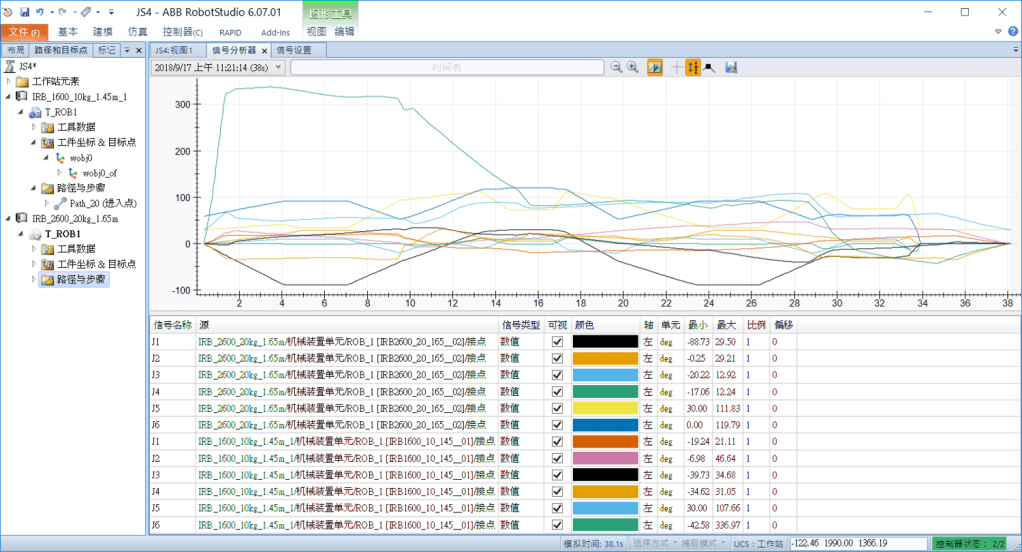
>>分析並擷取機械手六軸位移數據
>> ABB RobotStudio 模擬資訊 匯入Inventor Simulation 動力學模擬
- 作業一:匯入選用的ABB機械手3D模型
- 作業二:應用組合件約束定義各組件與六軸關節約束條件
- 作業三:進入 動力學模擬 環境
- 作業四:檢驗並調整六軸轉動接頭
- 作業五:設定接頭性質;匯入各軸位移數據
- 作業六:啟用模擬播放器,檢驗機械手模擬動作
>> ABB RobotStudio 模擬資訊匯入Inventor Simulation
>> 產線模擬整合 ABB RobotStudio + Inventor Factory Design + Inventor Simulation + Inventor Studio
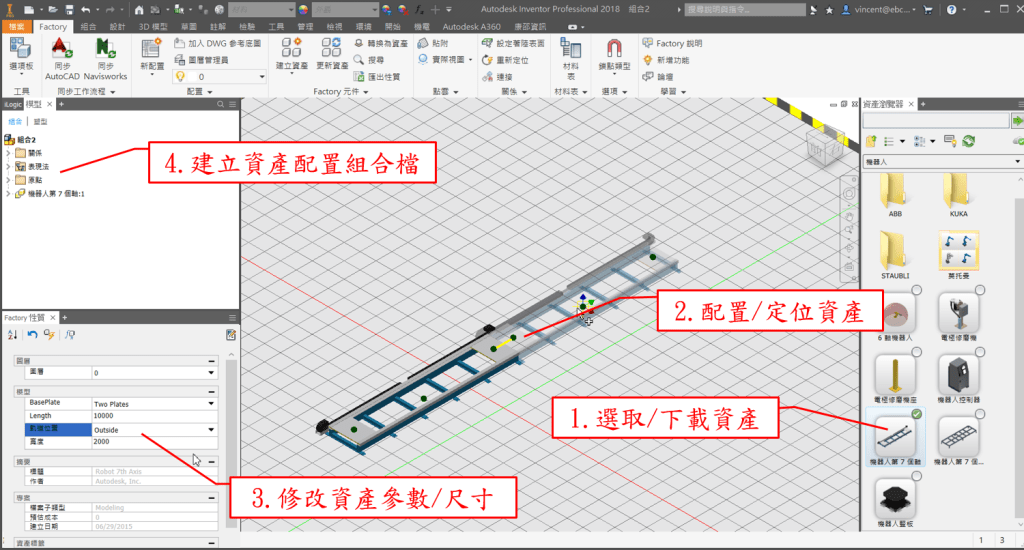
- 作業一:應用 Inventor Factory Design 建立產線配置
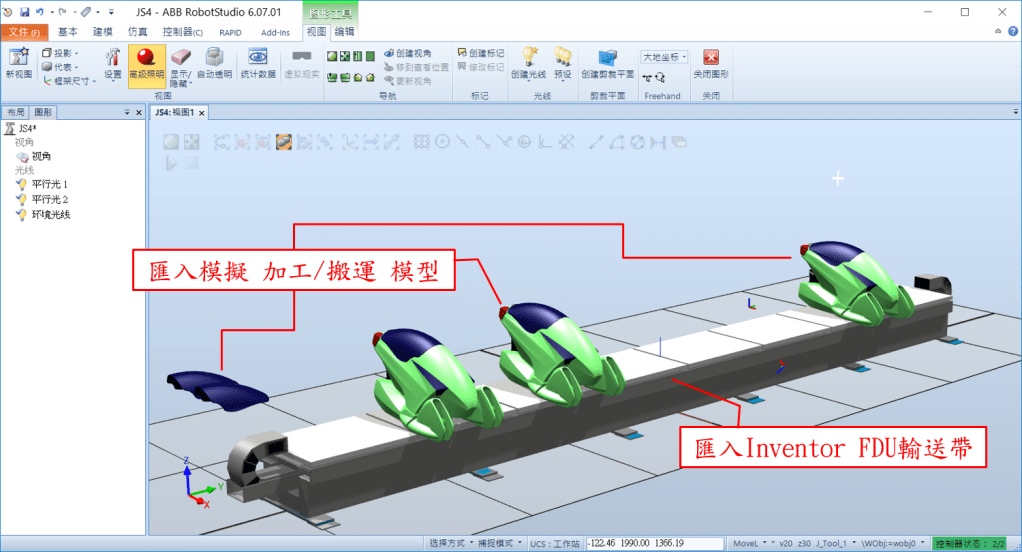
- 作業二:於 ABB RobotStudio 將 Inventor 建立的產線配置3D模型匯入
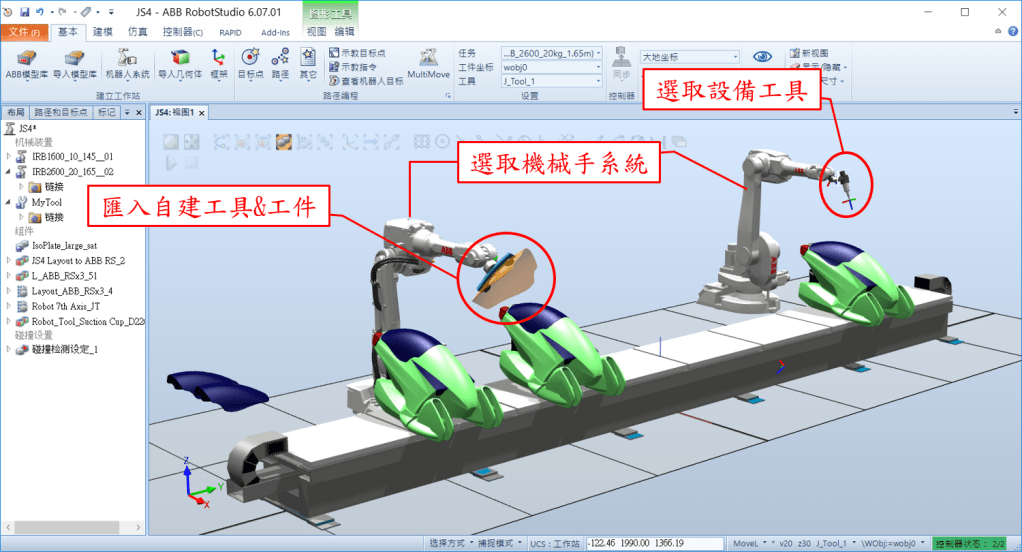
- 作業三:於 ABB RobotStudio 選取機械手系統、建立運動路徑、模擬機械手臂動作、擷取機械手六軸運動資料並匯出
- 作業四:依選取機械手匯入 Inventor 產線配置組合、定位機械手、建立各軸約束
- 作業五:於 Inventor Simulation 模擬機械手動作
- 作業六:於 Inventor Studio 加入機械手動作數據、建立其他模擬動作、串聯各項動作
應用Inventor Factory Design建立產線配置 >>>
於ABB RobotStudio將Inventor建立的產線配置3D模型匯入 >>>
於ABB RobotStudio選取機械手系統、設備工具 & 匯入自建工具 >>>
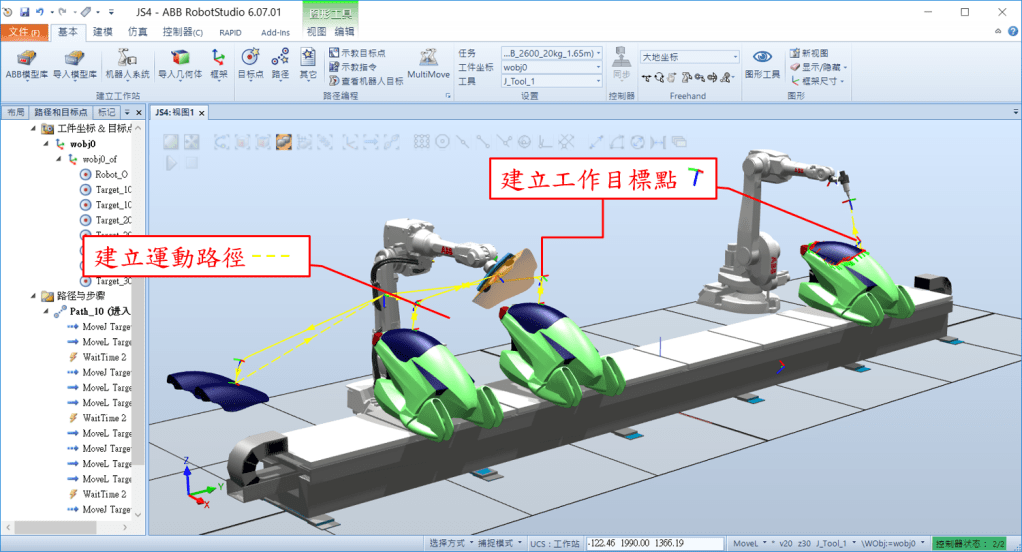
於ABB RobotStudio建立工作目標點 & 運動路徑 >>>
於ABB RobotStudio擷取兩機械手6軸(共12軸)運動資料並匯出 >>>
於Inventor Simulation模擬機械手動作 >>>

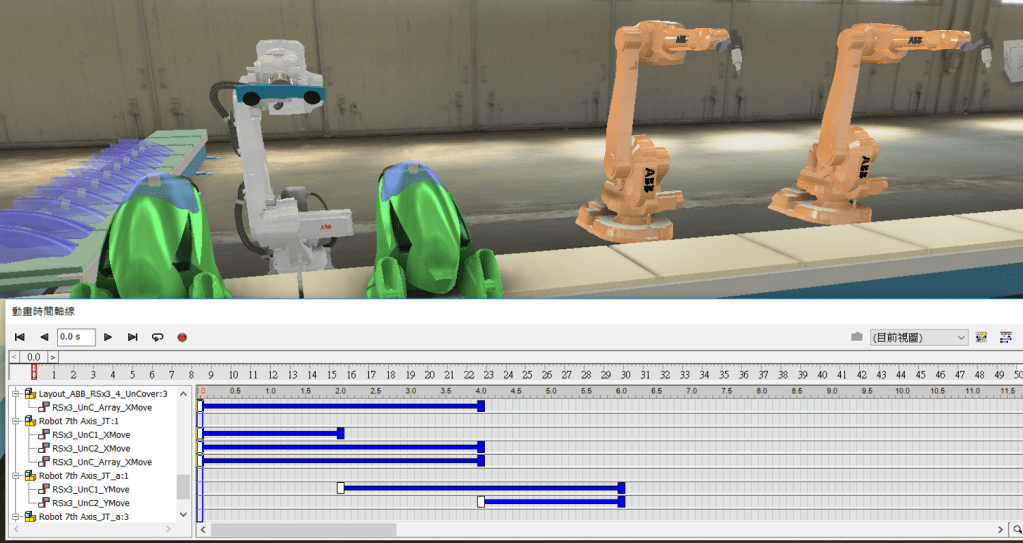
於Inventor Studio加入機械手動作數據、建立其他模擬動作、串聯各項動作 >>>
於Inventor Studio加入環境場景、光影設定 >>>
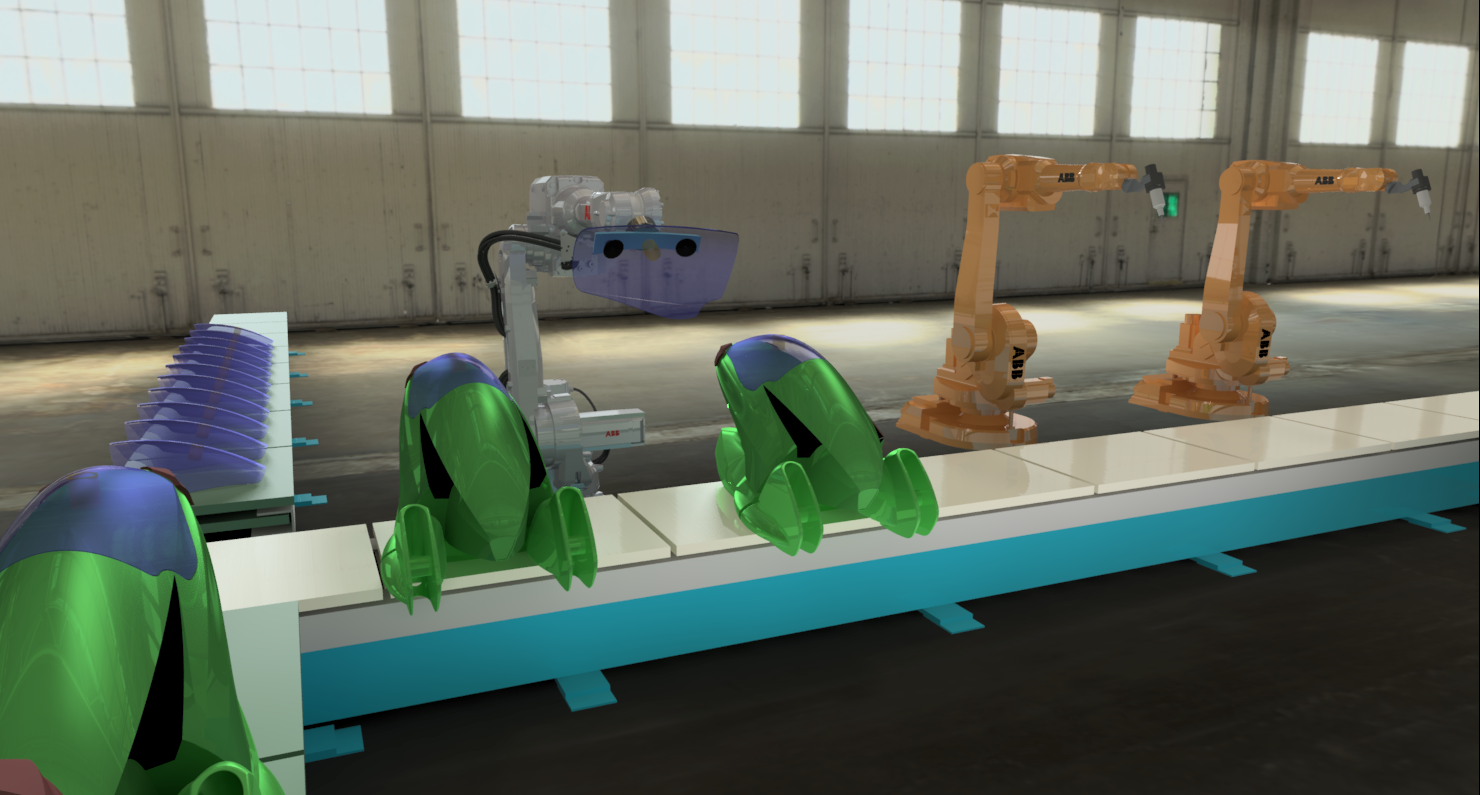
於Inventor Studio加入環境場景、錄製動畫 >>>
ABB RobotStudio 測試心得:
筆者以CAD使用者學習機械手模擬的角度彙整如下
- >>模組豐富:除主模組外還有8項與加工相關的PowerPacs;7項附屬應用工具
- >>功能完整:包含機械手與設備資料庫連結、CAD整合、目標方位與路徑編輯、Rapid程式編輯、控制器設定/連結、模擬資料分析與匯出
- >>操作介面:功能多相較設定複雜,但以CAD使用者習慣來看還算順手。最主要是3D空間方位、軟體架構與流程概念要清楚,自然能理解並習慣操作介面。
結語:
ABB RobotStudio 的主要功能是設計機械手臂的動作行程並進行模擬;Inventor Simulation 雖然可以作類似動作但過程相較複雜難學。
但若要作複雜機械結構模擬或產線模擬動畫,Inventor Factory Design + Inventor Studio + Inventor Simulation 會是不錯的搭配。其中需要機械手臂動作的設計&模擬,ABB RobotStudio 的整合必扮演重要角色。
